
Data: 31/03/2017
Descrição: Conceitos de robótica, computadores, dispositivos eletrônicos, tecnologia, histórico e aplicações. Sensor ultrassônico (HC-SR04), montagem de circuito em matriz de contato. Potenciômetro, oscilação de brilho de LEDs com código “blink” no software Arduino.
Evolução dos Computadores e os Robôs
Na terceira aula aprendemos mais sobre a parte teórica da robótica. Discutimos de um jeito filosófico sobre o que é um “robô”, quando foram feitos os computadores, diferentes dispositivos eletrônicos e a evolução da tecnologia.
Vimos que os primeiros computadores foram criados na primeira metade do século XX, eram grandes e gastavam muita energia pra realizar simples contas matemáticas. Com o desenvolvimento da Ciência, os computadores puderam aprimorar bastante, reduzindo o tamanho, consumindo menos energia, além de serem multitarefas.

Descobrimos que o termo “robô” vem de uma palavra tcheca e significa “escravo”; isto porque executa as ações que nós programamos para ele. Porém, um robô também é capaz de agir de forma autônoma, não precisando de um humano o controlando. E com isso surge a inteligência artificial (IA) que assusta tanta gente…
Mas não é para se assustar, porque encontramos hoje inteligência artificial em games (bots), Facebook (sistema que sabe o que você gosta e mostra mais sobre isso), entre outros dispositivos. E esta história de IA dominando o mundo não vai acontecer. E, caso aconteça, ainda vai demorar 😜
O Sensor Ultrassônico (de distância)
Voltando ao assunto: verificamos na aula o funcionamento do sensor ultrassônico (HC-SR04), o qual emite uma onda que atinge um objeto a sua frente; o objeto, então, reflete a onda e o sensor capta o sinal de retorno.
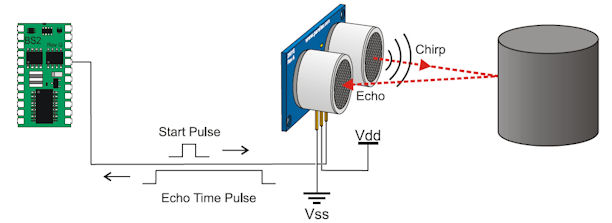
E o sistema calcula a distância pela seguinte equação:
v = d/t → então → d = v*t
Velocidade é distância dividida pelo tempo. Então, ajeitando a fórmula, a distância é a velocidade multiplicada pelo tempo. Como o sistema sabe a velocidade da onda (que é um valor padrão, em torno de 340 m/s – metros por segundo) e o tempo (que é o tempo entre o sensor ter emitido a onda e recebido depois ela refletida pelo objeto), é possível calcular a distância.
Para isso, verificamos que o sensor de distância é útil para se aplicar em:
- Verificação de portas: para saber, por exemplo, quando e
la está aberta ou fechada, e o quanto ela abriu; - Sensor de estacionamento: para facilitar no momento de estacionar o carro (ou para motoristas barbeiros mesmo, que precisam desse sensor).
- Sensor de presença: para detectar a presença de algum objeto ou pessoa e acionar a luz (ou alarme) quando ela estiver perto.

Existem infinitos outros jeitos de se utilizar o sensor, depende da finalidade e da criatividade de quem desenvolve o projeto.
O Potenciômetro
 Por último, demonstramos o potenciômetro e sua função, que é um resistor que varia de acordo com o ajuste definido. Os pinos da esquerda e da direita possuem um valor de resistência fixo, e o que varia é a resistência entre o pino das extremidades e o do meio. Com isso pode-se aplicar o potenciômetro para ajuste de volume em aparelhos de som, mudança de velocidade em ventiladores, alteração de temperatura no chuveiro e muito mais…
Por último, demonstramos o potenciômetro e sua função, que é um resistor que varia de acordo com o ajuste definido. Os pinos da esquerda e da direita possuem um valor de resistência fixo, e o que varia é a resistência entre o pino das extremidades e o do meio. Com isso pode-se aplicar o potenciômetro para ajuste de volume em aparelhos de som, mudança de velocidade em ventiladores, alteração de temperatura no chuveiro e muito mais…
Continuaremos analisando sobre o potenciômetro nas próximas aulas. Até!


Um comentário sobre “Aula 3”